Exploring With Your M3D GO
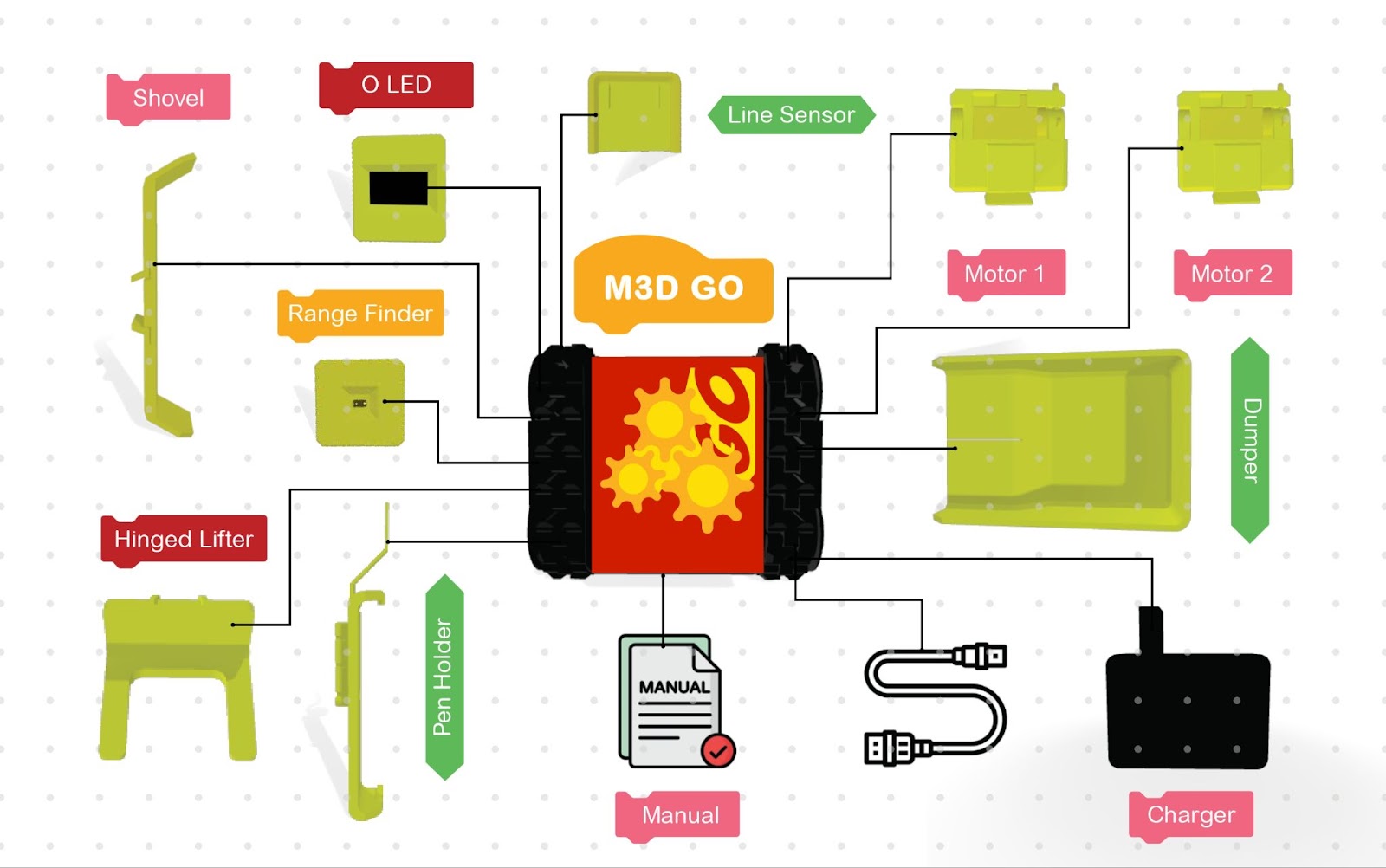
When you open the M3D Go kit, you will find the M3D Go Robot, it’s charger and the following attachments inside:
- OLED Screen
- Distance Sensor
- Line Sensor
- Servo Motor with mounting points which can be used with the following parts:
- Dumper
- Pen Holder
- Dozer
- Forklift
- Lego extension attachment
1. Getting Familiar with the Attachments:
All the included attachments connect directly to the robot and have plug-and-play connectors. You can just plug the attachment into any port and it will start working. To use the robot and the attachments, you will have to set up the robot and connect it to a computer/laptop.
2. Setting up the bot:
- To turn on the robot, press the white button on the side of the robot. Once turned on, you can see a red light blinking in a corner on the top part of it.
- When it is blinking slowly, that means that the robot is on and is in “pairing mode”. It can now be connected to a computer/laptop using Bluetooth.
- You may connect the display attachment to see your bot’s name as well as its battery status when you turn it on.
Note: All attachments need to be connected before turning the bot on so that it can detect them properly.
- Once the robot is turned on and the attachments have been attached, open the web browser on your system and go to https://scratch.markhor3d.com/.
- When the site is opened for the first time, it will take some time to download the M3D scratch files.
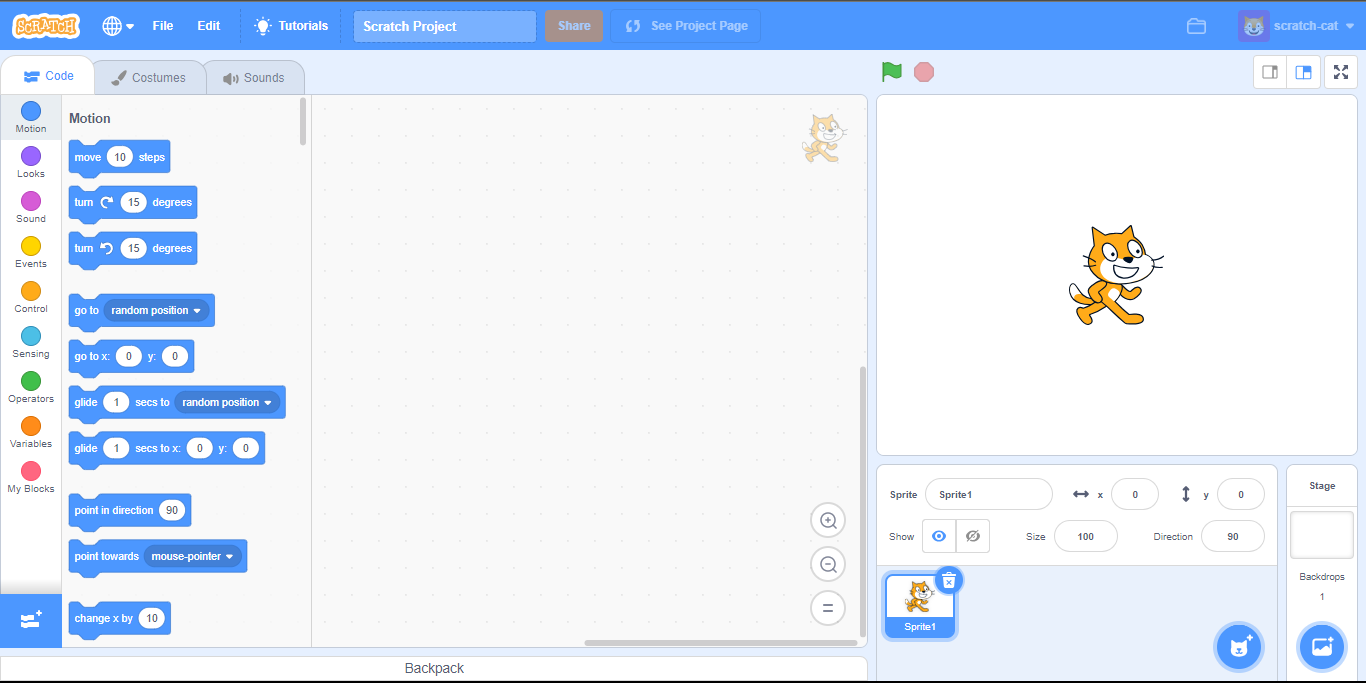
3. Introduction to Scratch:
Once the site has loaded, you should have the following screen in front of you:
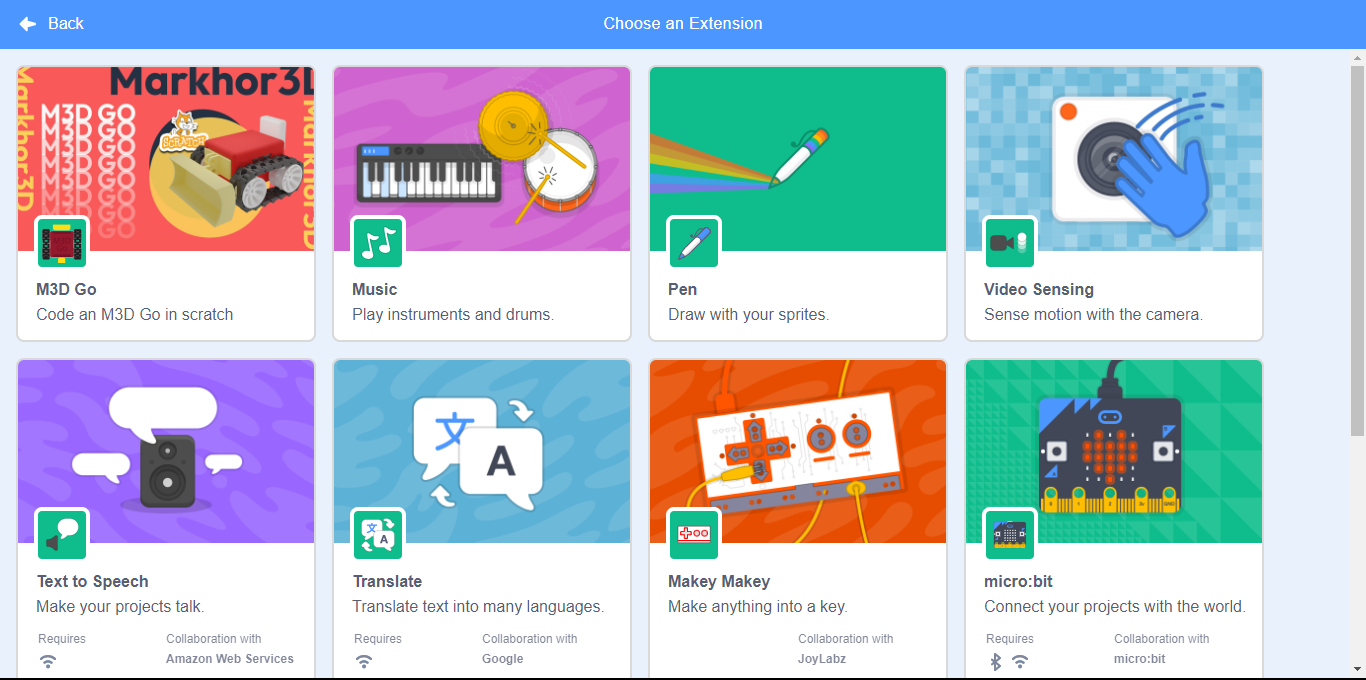
Click on the icon on the bottom left corner which has some blocks and a plus sign on it. It will take you the extensions page where you can add the M3D Go extension:
Once you click on it, a pop-up dialog should appear which will show your device name. Select your device name and then click on pair button.
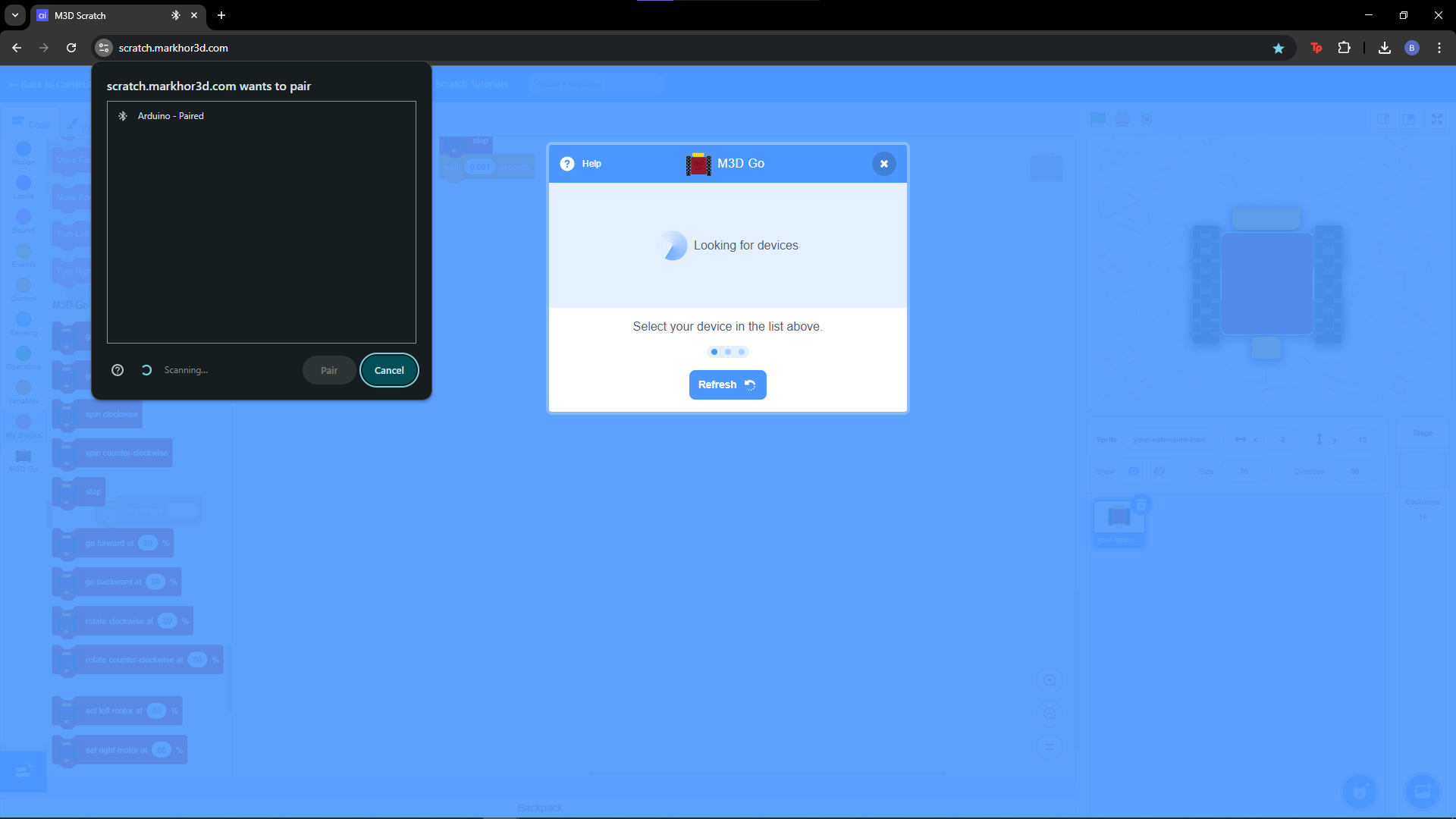
Once it connects, you should get a confirmation message:
New to Scratch:
If you are new to Scratch, you can download the following Scratch code:
M3D GO Basic Controls.sb3 (1.5 MB)
After downloading the file, you can load it in your scratch environment running on your web browser and you should get this scratch interface:
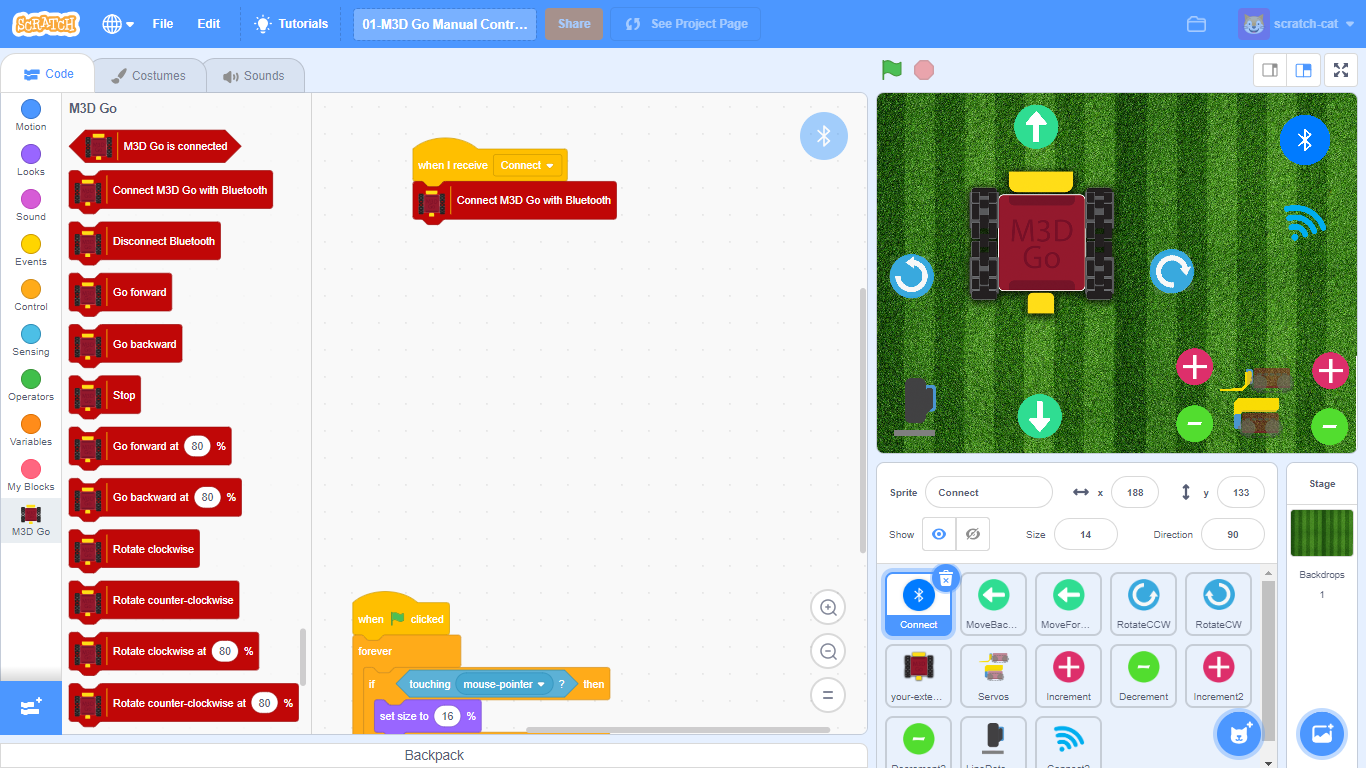
If the dialog box does not appear, you can connect it manually as follows:
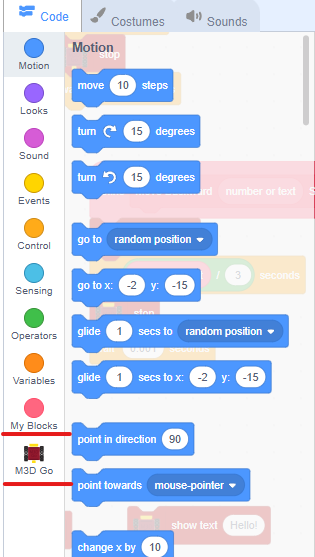
Scroll down to M3D GO blocks in list to your left:
You should see your bot along with a yellow button in front of it.

Click on it to connect your bot to connect your bot to the computer.
It should turn green once the bot is successfully connected:

Once connected, you can use the on-screen control pad to control the robot’s movement:
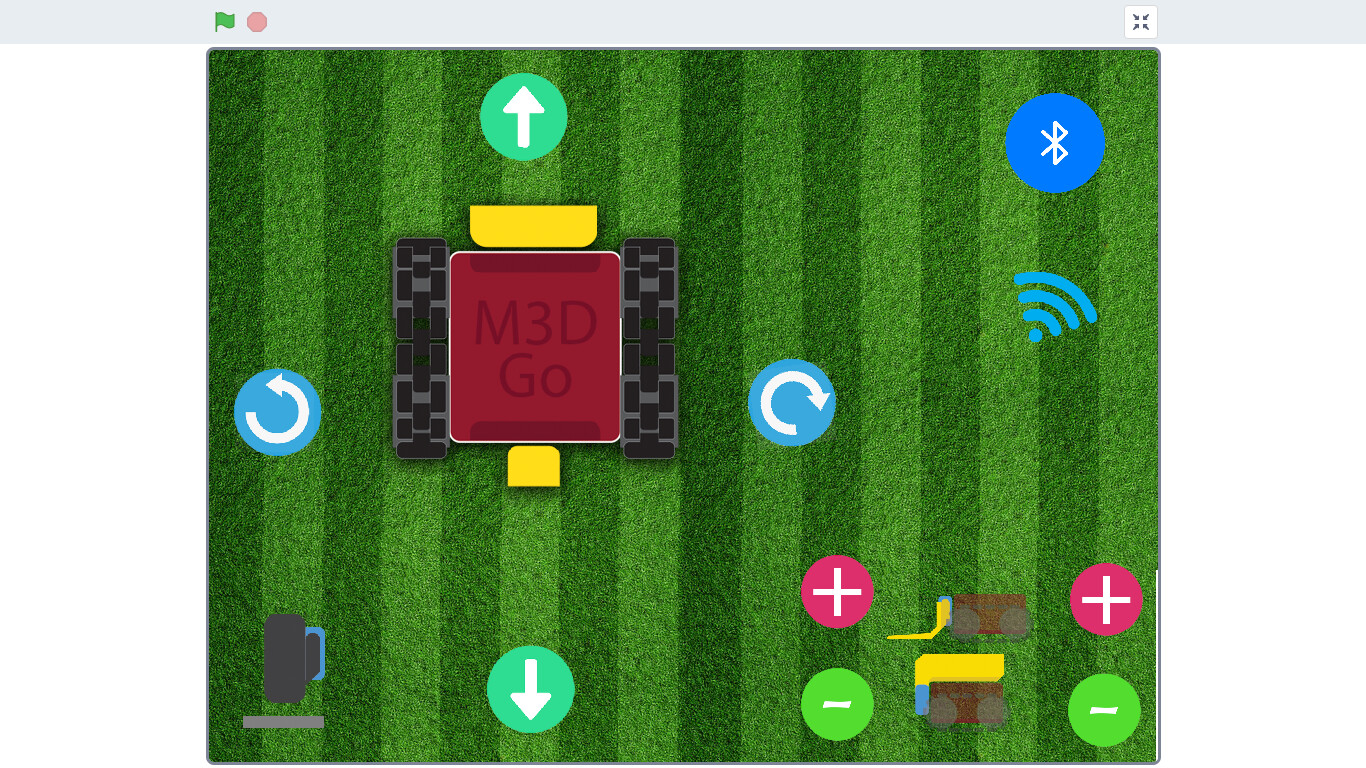
You can use your keyboard buttons to control the movement of the robot as well:
- Arrow keys for navigation
- Motor control keys: Q/A for motor 1 and W/S for motor 2
Controlling the robot with Scratch:
If you have used Scratch before and are familiar with the concept of block coding, then all of the blocks are self explanatory. If you have not, no need to worry. You can still go through the description in this part for better understanding and then use our pre-built programs code files which we will discuss in the next section. In Scratch, you have the following blocks:
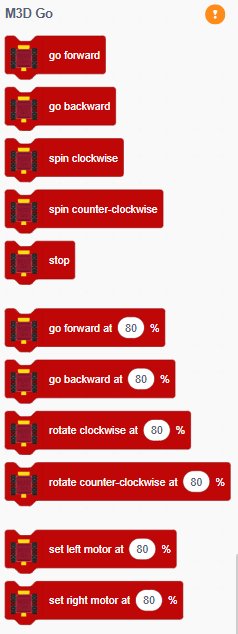
Movement Blocks:
- Go forward/backward
- Spin Clockwise/Counterclockwise
- Stop
- Go Forward/Backward at __ % for movement at specific speeds
- Rotate Clockwise/Counterclockwise for rotation at specific speeds
- Set left/right motor at __ % for individual motor control)
Servo Motor Control:
- Set blue/red servo angle __ degree for servo motor control
- Set blue/red servo speed at __% to control the speed of the servo motor

OLED Screen:
- Show Text __ to display any text on the robot’s screen
- Express __ to display premade emojis on the display
- Display: Use a matrix styled widget to display custom shapes
- Set pixel at , to bright/dark: Control individual pixels on the screen

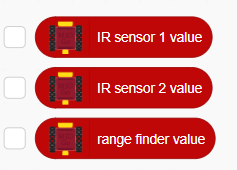
Sensors:
-
IR sensor 1, IR sensor 2 : These are the individual values of the two IR sensors in the Line Sensor attachment.
-
Range Finder Value: This is the value of the sensor in the Distance Sensor attachment.
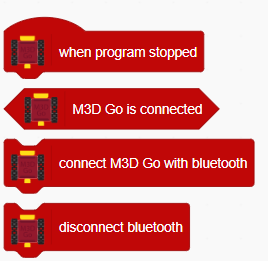
Connectivity Blocks:
- Connect M3D Go with Bluetooth
- Disconnect Bluetooth
- M3D Go is connected: This is a state block which tells you if the robot is connected or not. If you click on it and it says true, the robot is connected. If it says false, the robot has not been connected.
You can download session files from the other sessions as well and use the distance sensor and line sensor with the help of premade code to make your robot detect obstacles in its path, follow a marked path, map out its surroundings, tell an interactive story, react to physical input and much much more.
To fully tap into the capabilities of M3D Go, we recommend entry level familiarization with Scratch. For that you can watch the free Youtube playlist by “ShiftClickLearn” or any other resources you may find useful.
Furthermore, to set up and control GO using Arduino, click on this guide.
If you are facing issues with your Bot, you can go through this troubleshoot guide